运想改进臂式的高空作业平台控制系统新方向
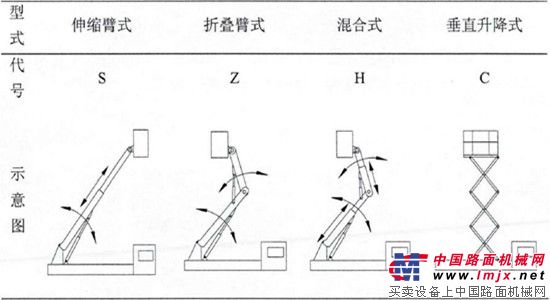
高空作业平台按行走方式可分为:自行式、牵引式、车载式三种。按臂架伸展结构类型,高空作业平台可为分伸缩臂式、折叠臂式、混合臂式和垂直升降式。如图:
从目前国内外对高空作业平台的研究成果和不同结构的高空作业平台应用来看,轨迹控制装置在多种工程设备上进行了应用,其明显作用是使操作更便捷和准确,同时降低劳动强度和提高工作效率。随着运想重工的高空作业平台软件技术的不断发展,促进了以软件控制为代表的自动化技术快速发展,运想对臂式高空作业平台的轨迹控制这种智能控制系统做了更好的改进。
直线轨迹控制系统因应用设备不同,采取的控制方法与策略截然不同,从而类似系统在不同设备间不能通用。针对伸缩臂高空作业平台,已经出现的不同臂式高空作业平台尚存在一些不足,运想将对臂式高空作业平台以下方面进行改进,让产品更优良:
(1) 高空作业平台领域内,已实现垂直升降这种直线轨迹控制功能,但其运用了高等机构学理论,进行复杂的矩阵运算,这对控制器提出较高要求,从而使得该装置生产成本显著增加。在申请该方面的国内发明中,其的控制算法公开不充分,并缺乏轨迹控制的完整性要素,且操作过程中存在一定的安全隐患。
(2) 高空作业平台将人员举升到高处作业,在此操作过程中,人员的安全性和舒适度是首要考虑的。由于该设备的执行机构运动特性不同,会在特定状况下,使得此位置闭环控制性能恶化,导致出现不安全情形。故各执行机构单独回路控制需选择合适控制策略和系统校正,这是已发表的研究成果都未涉及之处。
(3) 从产品的实际应用角度出发,大多数文献在控制系统研发过程中并未结合高空作业平台常规操作方法。部分文献没有考虑到高空作业平台长柔性臂架的挠度变形对轨迹控制效果的显著影响。
(4) 从高空作业平台轨迹控制装置研究成果可得,文章在装置功能描述上有详细介绍,但仅对该装置中某一环节进行数学推导。由于未进行系统完整的数学分析与推导,在该系统调试和应用过程中,系统校正往往采用现场调试,依赖于调试人员经验,从而增加了调试难度和延长了调试时间。(本文来自运想重工)








