信息取自网络,敬请自行核实。我们提醒您,本站仅提供信息,并概不负责准确性或真实性。建议您查阅多个来源以获取全面的信息。
以上内容取自网络,不代表路面机械网的观点和立场,仅供参考,注意甄别。
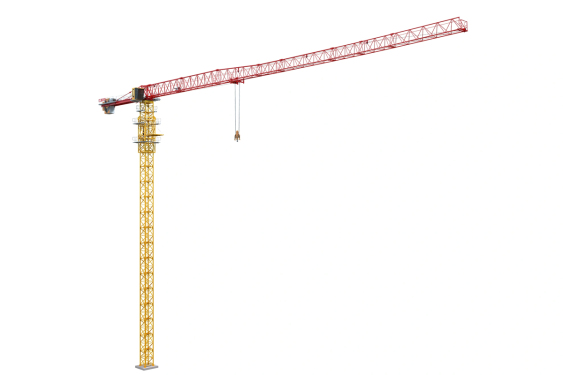
在建筑施工现场,波坦塔吊作为一种高效、稳定的起重设备,其性能的稳定性和操作的精确性对于施工安全和效率至关重要。其中,大臂延迟是塔吊操作中一个需要精细调整的参数。大臂延迟指的是从操作员发出指令到塔吊大臂实际开始动作之间的时间差。合理调整大臂延迟,不仅可以提高塔吊的响应速度,还能有效避免操作过程中的误动作,确保施工的安全和高效。 首先,要理解大臂延迟的产生原因。大臂延迟主要受到塔吊机械结构、电气控制系统以及环境因素等多方面的影响。例如,机械结构的摩擦、电气控制系统的响应时间以及风速等环境因素都可能对大臂延迟产生影响。 针对这些因素,调整大臂延迟需要采取一系列措施。首先,对塔吊的机械结构进行定期检查和维护,确保各部件的润滑和紧固状态良好,减少因机械摩擦导致的大臂延迟。其次,对电气控制系统进行优化升级,采用先进的控制算法和硬件设备,提高系统的响应速度和稳定性。 在具体调整过程中,需要结合塔吊的实际使用情况和操作员的反馈意见进行精细化调整。可以通过调整控制系统中的参数设置,如增加或减少延迟时间、调整加速度和减速度等,来逐步优化大臂的响应性能。同时,也可以利用先进的传感器和监控系统对塔吊的实时运行状态进行监测和分析,及时发现并解决问题。 除了以上措施外,还可以通过培训和指导操作员来减少人为因素导致的大臂延迟。操作员应熟悉塔吊的操作规程和性能特点,掌握正确的操作方法和技巧,避免在操作过程中产生不必要的误动作和延迟。 总之,调整波坦塔吊大臂延迟是一个需要综合考虑多方面因素的复杂过程。通过精细化调整和优化电气控制系统、机械结构以及操作员的操作技能等方面,可以有效提高塔吊的响应速度和稳定性,确保施工的安全和高效。






















 匿名
匿名
 匿名
匿名


 路面机械网友
路面机械网友