信息取自网络,敬请自行核实。我们提醒您,本站仅提供信息,并概不负责准确性或真实性。建议您查阅多个来源以获取全面的信息。
以上内容取自网络,不代表路面机械网的观点和立场,仅供参考,注意甄别。
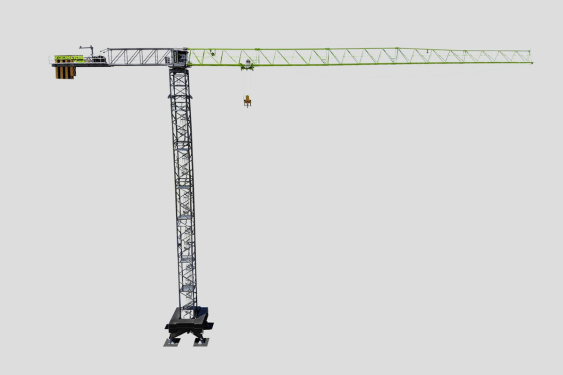
波坦塔吊作为一种高效的建筑机械,在建筑工地上扮演着举足轻重的角色。特别是在需要大臂生成以覆盖更广泛的工作区域时,波坦塔吊的控制显得尤为重要。大臂的生成不仅涉及到塔吊的整体稳定性,还关系到施工效率和安全性。因此,如何精确控制波坦塔吊的大臂生成,成为了每一个塔吊操作员必须面对和解决的问题。 首先,控制波坦塔吊大臂生成的前提是对其机械结构和工作原理有深入的了解。塔吊的大臂由多节伸缩臂组成,通过液压或电动系统驱动伸缩臂的伸缩,从而实现大臂的生成。在控制过程中,操作员需要根据工程需要和现场环境,精确计算大臂的伸出长度和角度,确保塔吊的稳定性和工作范围。 其次,为了确保大臂生成的精度和稳定性,波坦塔吊配备了先进的控制系统。这个系统能够实时监测塔吊的各项参数,如大臂的角度、长度、负载等,并根据这些参数自动调整伸缩臂的伸缩速度和角度。同时,控制系统还具备故障诊断和预警功能,一旦发现异常情况,能够立即发出警报并采取相应的措施,确保施工的安全进行。 在控制大臂生成的过程中,操作员的经验和技能也起着至关重要的作用。一个经验丰富的操作员能够根据现场环境和工程需要,灵活调整大臂的生成方式,提高施工效率。同时,操作员还需要不断学习和掌握新的控制技术和方法,以适应不断发展的建筑行业。 此外,波坦塔吊的大臂生成还需要考虑到与其他施工设备的配合。在施工现场,塔吊往往需要与其他设备如混凝土泵车、挖掘机等协同作业。因此,在控制大臂生成时,操作员需要与其他设备操作员保持密切沟通,确保塔吊的工作范围与其他设备的工作区域相互协调,避免发生碰撞或干扰。 总之,控制波坦塔吊的大臂生成是一个复杂而精细的过程。只有在对机械结构和工作原理有深入了解的基础上,结合先进的控制系统和操作员的经验技能,才能确保大臂生成的精度和稳定性,提高施工效率和安全性。






















 匿名
匿名
 匿名
匿名


 路面机械网友
路面机械网友